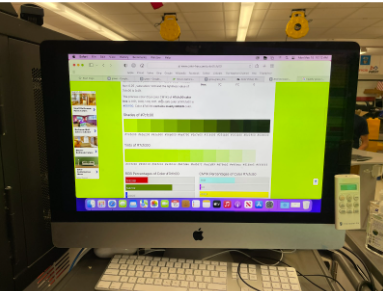
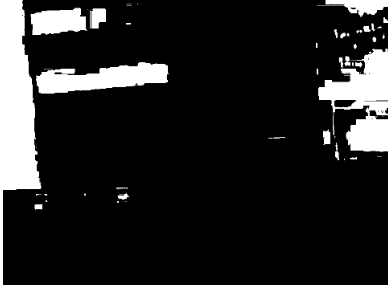
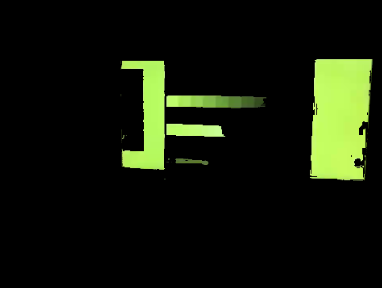
The image on the left, binarizes the image to it's left based on green:red ratios.
Since the program is supposed to differentiate healthy and unhealthy grass, I created a comparision between "g" in RGB and "r" and "b". If "g" was 1.5 times higher han both "b" and "r", the area would be white, meaning that it passed the test. Black areas were filtered out.
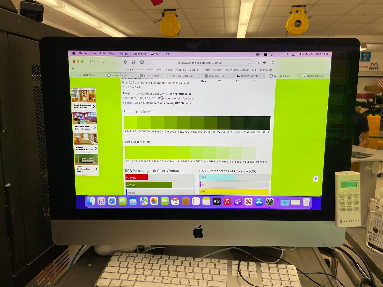
As can be seen, it did work to an extent, but is still not perfect. Additionally, "grass" areas should be kept as the original colors in the file, not white.
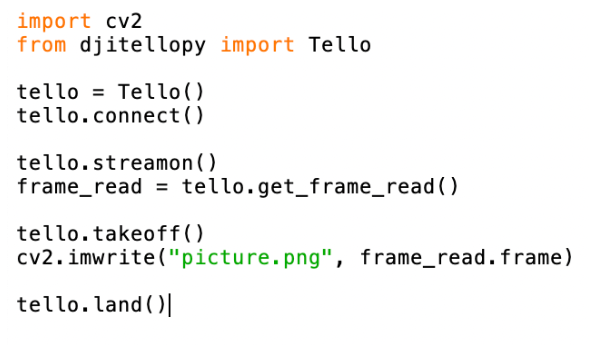
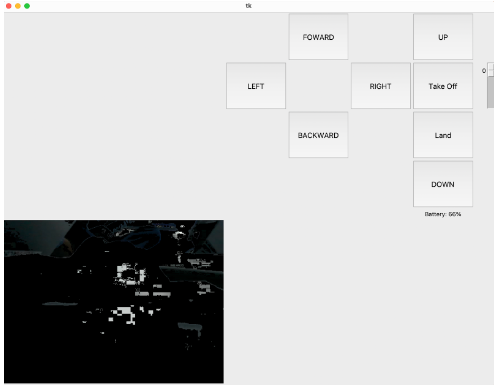
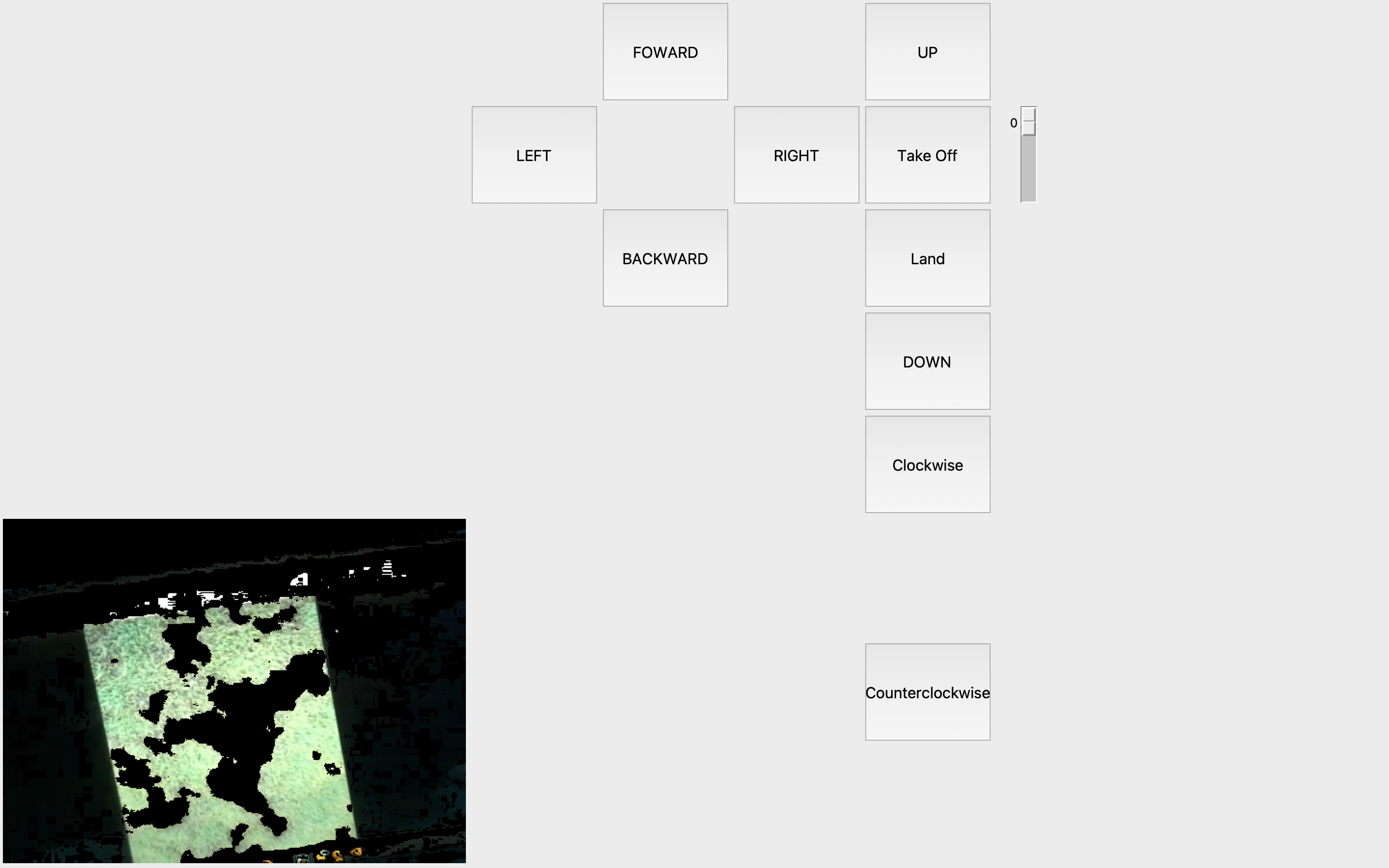
Note - all drone movement was removed until the implementation of tkinter since these developments revolve around image processing rather than performing patterns.